
Simulink
Simulink – это интерактивная система для анализа линейных и нелинейных динамических систем. Это графическая система настроенная на использование “мыши”. Она позволяет вам моделировать систему простым перетаскиванием блоков в рабочую область и последующей установкой их параметров. Simulink может работать с линейными, нелинейными, непрерывными, дискретными, многомерными системами.
В данной библиотеке содержатся блоки, способные генерировать следующие сигналы:
В этой библиотеке содержатся следующие блоки:
При описании дискретных моделей используются узлы и блоки, которые соответствуют блокам для описания непрерывных систем.
При описании линейных моделей систем вы можете использовать следующие блоки:
Звенья могут задаваться как нулями и полюсами, так и коэффициентами при соответствующих степенях дробно-рационального выражения.
Здесь содержатся такие узлы :
При двойном нажатии левой клавиши “мыши” на данном элементе вы получаете доступ к дополнительным блокам если они установлены.
В стандартную установку входит блок :
Этот блок включает в себя еще шесть блоков.
Additional Sinks – дополнительные средства визуализации сигналов при помощи которых можно исследовать спектральный состав сигнала или построить график функции корреляции двух сигналов.
Additional Discrete – здесь содержатся допонительные блоки для исследования дискретных систем. Эти блоки являются аналогами стандартных блоков с тем исключением, что для каждого из этих блоков можно задать начальные условия.
Additional Linear – содержащиеся здесь блоки являются аналогами стандартных блоков с тем исключением, что для каждого из этих блоков можно задать начальные условия, также здесь имеется ПИД - регулятор.
Transformations – в эту группу входят блоки, производящие перевод из одной системы координат в другую, а также блоки преобразований температур в различных исчислениях.
Flip Flops – содержащиеся здесь блоки имитируют работу различных триггеров (RS, D, JK). Также здесь имеется блок подачи тактовых импульсов.
Linearization – содержащийся здесь один блок выполняет либо взятие производной входного сигнала либо его линеаризацию.
Пример построения модели с нелинейным элементом в цепи обратной связи и исследование устойчивости ситемы.
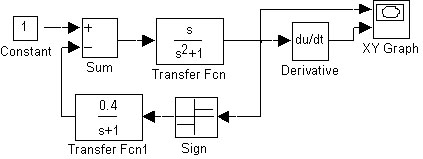
Для построения фазового портрета для данной модели используются узел дифференцирования (du/dt) и узел отображения информации по двум координатам (XY Graph).
При этом получаем следующий фазовый портрет:
Таким образом, из анализа графика можно сделать вывод, что эта система является устойчивой.


 Дискретные модели
Дискретные модели Линейные модели
Линейные модели Нелинейные
элементы
Нелинейные
элементы